Feature Detection
Identification of Invariant Interest Points and Descriptor Localities
Vol. I · Part 02
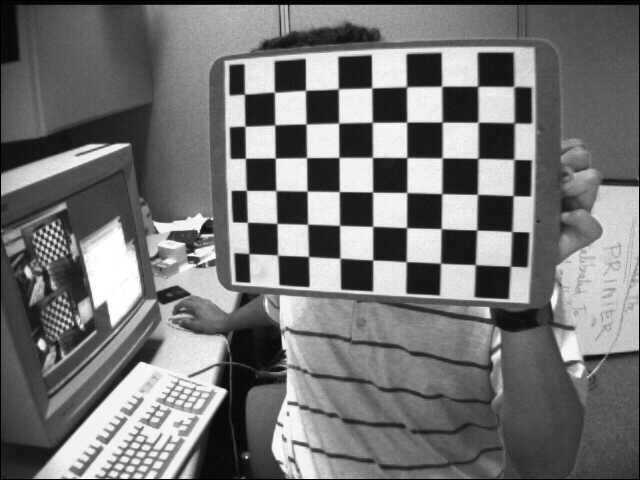
The Harris Operator
Corners are the most significant local features within an image, characterized by high variance in all directions. The Harris Corner Detector analyzes the local auto-correlation function, effectively measuring intensity changes through gradient analysis in the spatial domain.

Harris Parameters
Ready for detection
Plate 2.1 — Gradient Analysis and Corner Response
Correspondence & Descriptors
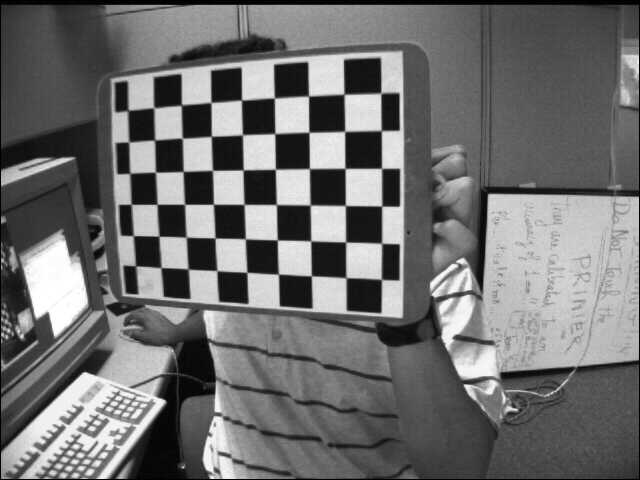
Beyond simple detection, the challenge of computer vision lies in matching features across disparate viewpoints. Modern algorithms like ORB utilize binary descriptors to represent the neighborhood of a point in a rotationally invariant manner.
To ensure robustness, we apply Lowe's Ratio Test, filtering matches by comparing the distance of the nearest neighbor to that of the second-nearest. This statistical thresholding preserves only the most unique correspondences.
Matching Parameters (ORB)
Matching Status
Ready to correlate features...
Awaiting Correlation
Plate 2.2 — Keypoint Correspondence under Euclidean Transformation
Homography & Perspective Projection
Given a set of point correspondences between two images of a planar surface, we can compute a Homography: a 3x3 projective transformation matrix that maps coordinates from one image plane to another.
Geometric Solver (RANSAC)
Solver Consensus
Ready to compute perspective warp...
Awaiting Warp
Plate 2.3 — Planar Warping via Perspective Rectification
In practice, we employ RANSAC (Random Sample Consensus) to iteratively estimate this matrix while effectively rejecting outlier matches that do not conform to the geometry of the scene.